新闻资讯
新闻资讯
- 我国在传感器产业链合作水平的提升,将不再受制于人!
- 从一份用户调查看PLC编程语言和编程平台的现状和趋势
- 步进电机和伺服电机在PLC电气控制系统中的选型建议
- 如何防止步进电机丢步?一起来看看
- 自动喷涂设备喷涂机在电动车头盔安全帽生产中的应用方案
- 科慧机电祝贺雷赛智能A股上市成功
联系我们
手机:13826992025
电话:0769-22262650
地址:东莞市东城红荔路7号怡诚大厦7楼
产品资讯
微步和微步仿真代表了步进电机技术的重大进步
- 作者:admin
- 发布时间:2019-11-26 15:21
- 点击:
微步进是多年前引入的步进电动机技术的一项重大进步,该技术使电机可以在运动中进行更精细的步进。通过操作当前矢量,微步创建非常精细的步分辨率。较小的步长将导致更精确的定位。它还减少了转矩脉动,提供了更平稳的运动并减少了振动和可听见的噪音。微步进技术使许多应用受益,例如3D打印机,它具有产生更精细的特征,更光滑的表面以及更安静的室内医疗设备的能力。
全步进是驱动步进电机的唯一经济实惠的方法。最早的步进电机驱动器是采用简单逻辑的全步进操作,从而降低了驱动电子设备的成本。全步也使使用最简单的驱动器:LR驱动器成为可能。该驱动器使用开关和绕组电阻(或外部功率电阻器)来控制相电流。LR驱动器在每个绕组中仅提供两个电流值(正负),并提供非常低的轴功率。
LR驱动器的操作对于诸如在打印机中分度压纸卷轴和其他低速应用程序的应用效果很好。但是,LR驱动系统中的扭矩会随着静止时的速度急剧下降,这对于大多数现代自动化应用而言都是不希望的。没有强大的高速扭矩,LR驱动器效率低下,并且只能在低速和低功率应用中使用。
图1显示了全步驱动步进电机的转矩与位移曲线。全步进电动机仅允许对电动机绕组施加全电流,因此产生的转矩曲线固定为90度。这会导致电动机轴转动时转矩发生很大变化,也称为转矩波动。转矩波动会产生粗糙的运动并产生可听见的噪音。控制各相扭矩的公式为:
T A = K T sin(θ)
T B = K T sin(θ− 90◦)
T -A = K T sin(θ− 180◦)
T- B = K T sin(θ− 270◦)
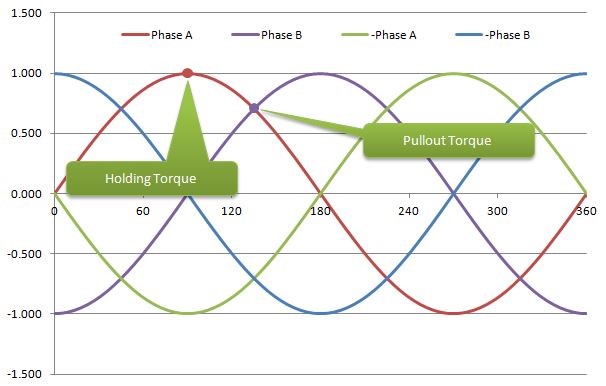
1.保持转矩是将电动机轴保持在所需位置的可用转矩。如果外力超过保持扭矩,则电机轴将跳至另一个位置,通常为7.2度。远离预期位置。拔出扭矩是在电动机运行时可用来加速惯性负载或克服摩擦的可用扭矩。
微步进的优点
现代步进电机驱动器使用开关模式PWM功率放大器来控制绕组电流以及允许微步进的更为复杂的逻辑(嵌入式处理器)。在处理和传感方面的进步使得划分典型混合式步进电机的1.8度角成为可能。完整的步骤分成更小的步骤(图2)。在将每个完整步骤分为10个微步时,此公式将确定经过阶段A的第一个微步:
T = 0.988 * sin( θ)= 0.156 * sin(θ- 90◦)
T = 0.988 * A相+ 0.156 * B相
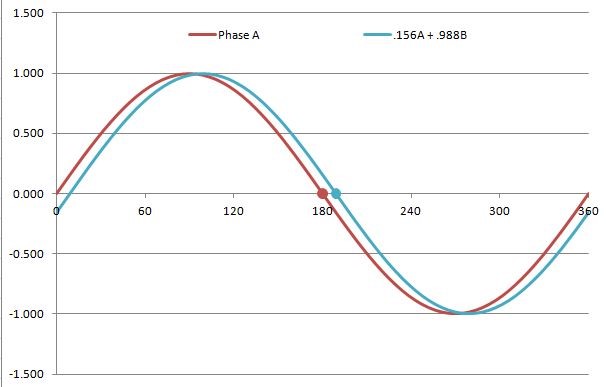
2.此图说明了微步距转矩矢量与全步距矢量的间距要近得多。可以利用它来实现更平滑的运动和精确的定位。
微步进的魔力在于可以更精确地控制每个绕组中的电流,从而更精确地控制扭矩和位置。应用受益于更少的振动和噪声。几乎任何现代混合式步进电机都可以从微步进中受益,因为其设计允许针对正弦转矩与角度的关系优化磁性元件。
微步仿真为低频索引系统模拟微步
许多索引方案(例如PLC上的低频输出)无法提供高频步进信号。在这些情况下,微步进将大大降低电动机的最高速度。此外,许多机器都是围绕粗分辨率分度器(仅限于全步或半步分辨率)设计的,因此改用微步法是不切实际的。
Microstep Emulation支持合成微步进,以实现低速平滑度和高速操作。该过程接受来自分度器的粗分辨率步进信号,并使用驱动器自身的内部高分辨率微步合成指令的运动。这种高速过程“锁定”在进入的步骤序列上,并以平滑的微步跟随它。运动的平滑度几乎可以与真正的微步进一样好。但是,最终位置将不如微步进那么精确,因为它由多个完整的步长组成(图3)。
如果控制器将速度限制为全步,则步进电机厂家应考虑微步仿真。如果控制器可以提供微步进所需的高速脉冲速率,则应将驱动器设置为微步进。
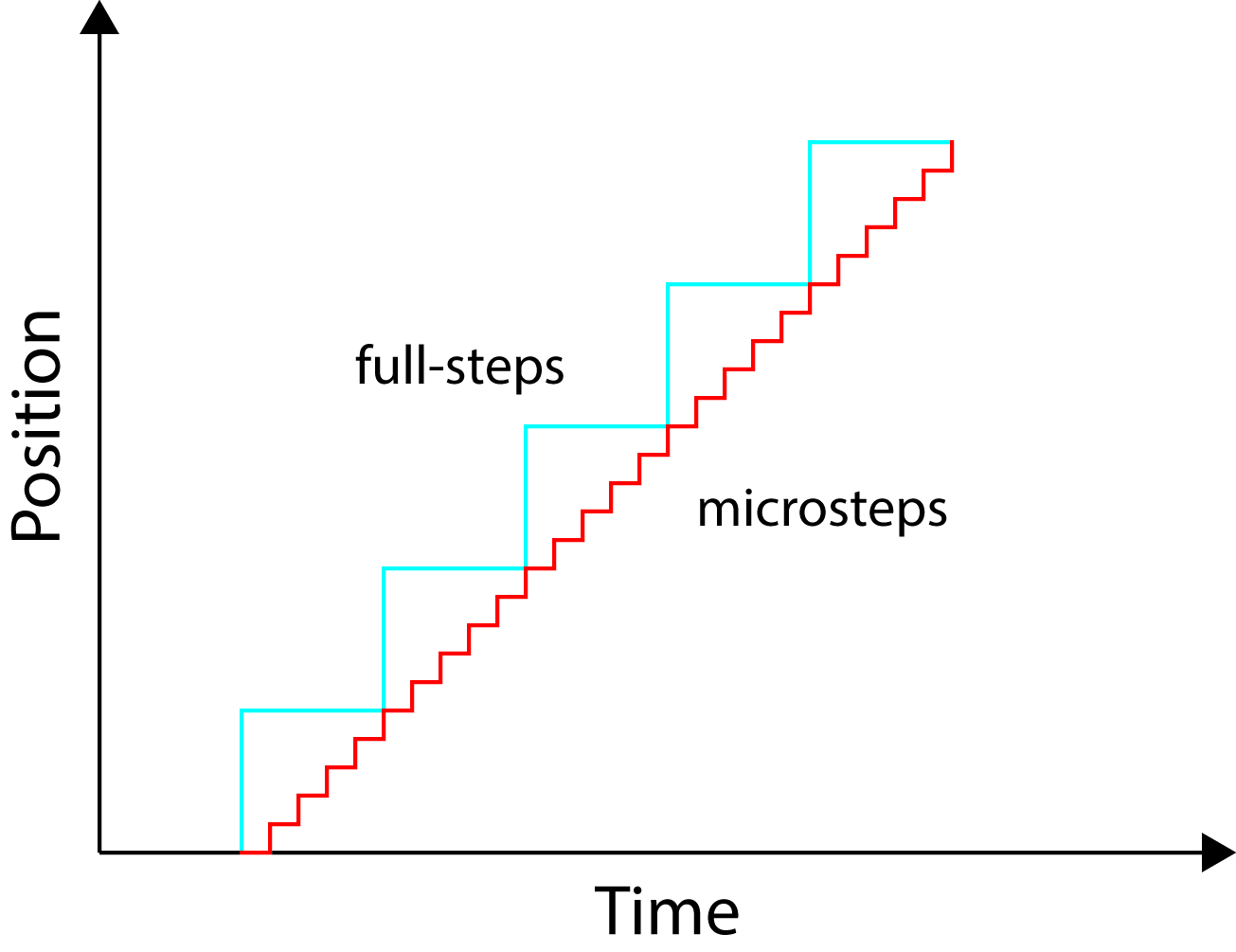
3.驱动程序以电子方式将每个进入的完整步骤分为几个微步骤。移动的总距离是相同的,但是通过使用更紧密间隔的转矩矢量可以减少转矩波动。
与全步相比,微步具有许多性能优势,包括更精确的位置和扭矩控制,更少的振动以及更小的听觉噪声。尽管这些优点使所有步进电机应用受益,但它们在诸如3D打印,图像扫描,相机或传感器定位,精密组装等精密应用中尤其有益。
使用不提供高频脉冲信号的控制器的应用程序仍可以通过使用提供微步仿真的驱动器来利用微步的好处。高速应用可能适用于全步进电机。但是,采用微步进或微步仿真时,风险较低,性能更好。您的电动机/驱动器源应提供资源以简化过程。
工程师可以使用在线计算器,这些计算器可以帮助您确定微步仿真的内容。驱动器可以通过两种方式在其电机中启用微步仿真功能:
步进驱动器和集成式步进器带有板载拨码开关。操作员选择200 SMOOTH(带微步仿真的全步进)或400 SMOOTH(带微步仿真的半步进)拨码开关设置。
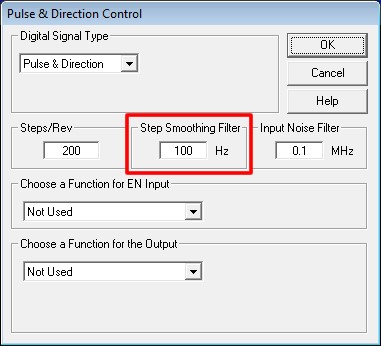
使用ST Configurator软件,操作员可以在“运动”>“脉冲和方向控制”对话框(屏幕截图)中调整“步阶平滑滤波器”值。步进平滑滤波器值越低,微步仿真的影响越大。较低的值会导致将更多的合成微步注入到命令运动中。例如,步进平滑滤波器值10 Hz将产生极其平滑的运动,而等于或大于1,000 Hz的值等效于以原始的低频步进分辨率运行电动机。
- 上一篇:步进电机的功能介绍与优势
- 下一篇:步进、闭环步进、交流伺服产品的对比





 客服QQ
客服QQ